

Highlighting University of Wisconsin-Madison’s TiM$10K Contributions
As the use of autonomous robots is on the rise, the field of robotics continues to advance faster with new innovations, many including the use of LiDAR sensors. SICK's TiM$10K Challenge provides university students from all over the country an opportunity to create projects that showcase how LiDAR can best be applied. For 2020, we had two participating teams from the University of Wisconsin-Madison (UW-Madison).
Student teams were supplied with a SICK 270° LiDAR, a TiM, and accessories. They were challenged to solve a problem, create a solution, and bring a new application that utilizes the SICK scanner in any industry. While these teams didn’t win, we appreciate the hard work they put in and we want to highlight their projects in this post to show what students can achieve with just a few months of work.
Team One: BadgerBOAT, the Autonomous Research Vessel
Our first team included Peter Sauer, Thomas Kelly, Jake Rymsza, Taylor Waddell, Wyatt Barber, and Sanket Singel. These six engineering students came together to create the BadgerBOAT Autonomous Research Vessel, a solar-powered boat that patrols lakes and rivers at-risk of serious contamination. They were advised by Lennon Rodgers, Director of Grainger Engineering Design Innovation Lab in UW-Madison’s College of Engineering.
 Not too far from the UW-Madison campus is Lake Mendota, a lake regularly researched by the University’s Limnology Department and many health and community organizations. Lake Mendota is well cared for by the community, yet it remains plagued by contaminants like blue-green algae and Perfluorooctanoic Acids (PFAs). These contaminants are extremely harmful to the organisms that live in the lake and even people.
Not too far from the UW-Madison campus is Lake Mendota, a lake regularly researched by the University’s Limnology Department and many health and community organizations. Lake Mendota is well cared for by the community, yet it remains plagued by contaminants like blue-green algae and Perfluorooctanoic Acids (PFAs). These contaminants are extremely harmful to the organisms that live in the lake and even people.
Exposure to these contaminants can occur by swimming in the lake, or even inhaling wind-blown mist from contaminated water. Symptoms range from skin irritation, headache, and vomiting for a few days, to long-term kidney or brain damage.
“Researchers risk their own health by entering the lake, so tests are infrequent, which allows for contamination to spread,” Barber said.
To bypass this problem, this team of engineering students created the BadgerBOAT for SICK’s 2020 TiM$10K Challenge. This solar-powered, autonomous boat uses a built-in GPS to navigate on the lake, while using the SICK LiDAR to scan the water. The BadgerBOAT is capable of collecting samples at designated GPS waypoints.
Because the boat is powered by a bank of six Valence 12V batteries, missions can last up to 11 hours. If the weather permits, the solar panels can be used to recharge them. The data collected by the BadgerBOAT is brought back to researchers on land, where they can safely and easily analyze patterns and conduct tests. The first test of BadgerBOAT’s capabilities was to perform a completely autonomous GPS test.
“For this test we set out two buoys on the lake at known GPS coordinates. We then gave the boat these coordinates in its mission file. Two group members were out in a canoe in case something went wrong, but aside from that the boat was completely on its own,” Rymsza said. “The test was a success and the boat made it around both points and back to its initial starting point completely autonomously.”
The team then conducted a second test to determine how best to implement LiDAR-based obstacle detection and avoidance.
“Dry land testing of the computer system showed that the SICK sensor, our obstacle avoidance program, and our custom filtering and clustering program were working as expected,” Singel explained. “Unfortunately, shutdowns due to COVID-19 halted further testing.”
Despite this, the team still has hope. “We’ll continue to build on this project next fall semester. We hope to one day have Badger Boats patrolling and improving lakes across the country,” Sauer said.
Team Two: Freefall, the Seeing-Eye Robot
UW-Madison’s second team consisted of students Victor Freire, Parker Schroeder, Allison Conrad, and Sebastian Piedra. They developed Freefall as an aid to the visually impaired. The team was advised by Assistant Professor Peter Adamczyk from UW-Madison’s College of Engineering.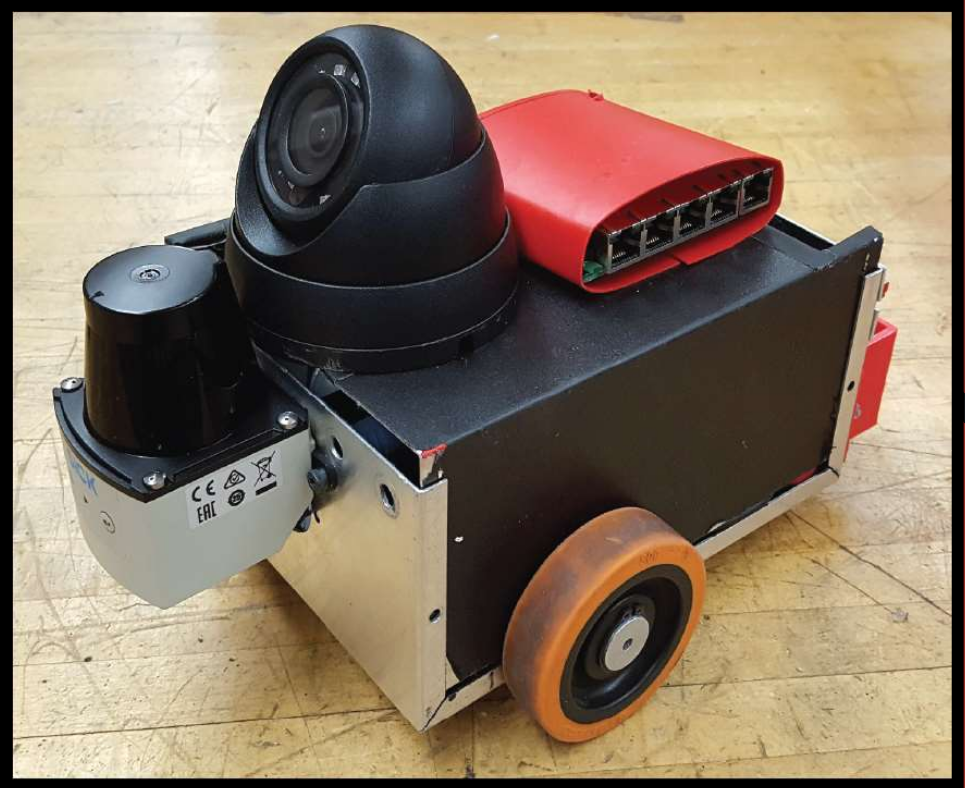
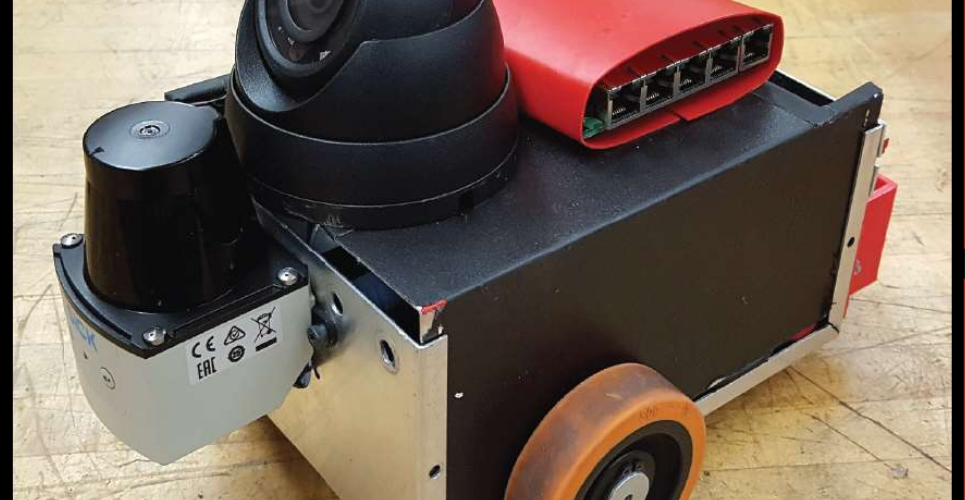
Freefall is a shoebox-sized guiding robot, meant to give the visually impaired a cheaper alternative to a well-trained seeing-eye dog, which can cost anywhere between $45,000 and $60,000. A visually impaired person also runs the risk of outliving his or her seeing-eye dog, which results in multiple expensive replacements in a single human lifetime.
An alternative to a seeing-eye dog is a cane, as they are much cheaper and do not have to be fed or nurtured like a dog. However, a cane is only as efficient in detecting obstacles as its length. The TiM781 range of up to 25m outperforms any walking cane.
“When you consider costs, Freefall is already a way better choice than a cane or seeing-eye dog. Our prototype only cost us $520,” Schroeder explained.
Although Freefall was originally based on a design for a Mars Rover, the team decided to first focus on making the robot well-suited for indoor navigation. It would still be an option to revamp Freefall’s drivetrain for outdoor traversal. This is mostly due to the team having chosen electronics and sensors that are commercially available and well-documented.
Freefall weighs about four pounds, features an aluminum box for the chassis with a removable lid coated in spray rubber for electrical insulation, and it has a drivetrain which consists of two hobby DC motors with rubber wheels and a 3D printed stabilizer in the back.
“Having baseline knowledge about our hardware components allowed us to build on the LiDAR quickly,” Conrad said.
The team had a minor problem with the LiDAR sensor- it would connect to their lab’s Ethernet with its own IP and Wi-Fi network, which would confuse computers. Computers were unsure which components would be using any particular network. Luckily the team had previous experience with SICK products through school projects, so they knew how to manually adjust the settings.
“We’d use Wi-Fi to send code to Freefall, and Ethernet to retrieve data from the LiDAR sensor,” Freire explained.
The Freefall team’s biggest problem was COVID-19. Their university shut down just when spring break had begun, which gave them no time to properly react to the change in circumstance. With no access to their workspace and robot, the team was forced to leave the project untested.
“Even though the project wasn’t completely done by the end of the competition, we’re glad we took this opportunity,” Schroeder said. “We learned a lot.”
 Register for the 2020-2021 TiM$10K Challenge
Register for the 2020-2021 TiM$10K Challenge
SICK is now accepting entries for the TiM$10K Challenge for the 2020-2021 school year! Student teams can register online by September 14, 2020. Student teams are encouraged to use their creativity and technical knowledge to incorporate the SICK LiDAR for any industry in any application. Advisors/professors are allowed to guide the student teams as required.
This contest was supported by PMMI Foundation’s U Skills Fund. PMMI Foundation works to grow awareness of careers in packaging and processing, providing assistance to schools and programs that develop students to excel in the industry.


