


Highlighting TiM$10K Project Submissions from Students at Texas A&M University
For the 2019-2020 school year of SICK's annual TiM$10K Challenge, university students from all over the country submitted projects that showcase how LiDAR can best be applied. Of all the submissions, three participating teams came from Texas A&M University (TAMU). They were supplied with a SICK 270° LiDAR, a TiM, and accessories. They were challenged to solve a problem, create a solution, and bring a new application that utilizes the SICK scanner in any industry. While these teams didn’t win, we appreciate the hard work they put in and we want to highlight their projects in this post to show what students can achieve with just a few months of work.
Team One: The Obstruction Detection System
The first team from TAMU included students Ahmad Albierouti, William Allcorn, Matthew Bevers, Jonathan Hansen, Caitlyn Keehan, and Taylor Liang. The team was advised by Graduate Teaching Assistant Namita Anil Kumar from the University’s Mechanical Engineering Department. This team created an Obstruction Detection System (ODS) to help wheelchair/mobility scooter users better detect objects and terrain changes between the object and the user for their TiM$10K entry.
As the median age of the United States’ populace is increasing, there is a growing demand for different types of personal mobility devices to properly assist the aging population’s needs. However, the increased need for power mobility devices (PMD) – 1.7 million in 2013 – can correlate with a higher risk of collisions, which may be fatal for elderly users. Because many users of assisted mobility vehicles suffer from some sort of limited range of motion, they cannot look and see what is behind them when wishing to reverse in the wheelchair/mobility scooter.
The team interviewed Kyle Cox, a powered wheelchair user, on the use of sensors in wheelchairs. He stated that he does not have any sort of sensor on his wheelchair, but “it would be helpful, especially in tight spaces where I have to watch for many things when turning.”
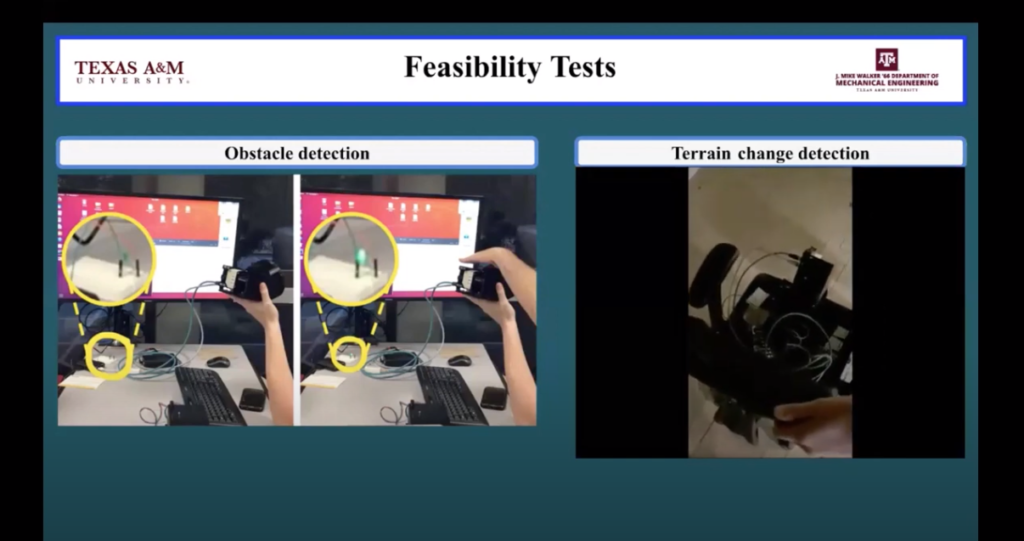
The team decided to focus their project on detecting obstacles and terrain changes directly behind the wheelchair at a distance of three inches to six feet. The SICK TiM781 LiDAR sensor is mounted sideways so that the scan is along the y-axis. In order to be able to survey the entire rear of the PMD, a stepper motor was placed below the LiDAR to rotate the sensor around the y-axis. This way, the LiDAR sensor can detect both obstacles and elevation changes. As the LiDAR scans the y-axis, the stepper motor allows the sensor to get data along the x-axis for a 3D point cloud.
The team was able to conduct several experiments on the prototype to test everything from the LiDAR to the battery. While they were unable to conduct multiple trials for each experiment, they were able to create a successful prototype. The team believes their prototype will positively impact the future of obstruction detection for people using PMDs.
Team Two: VALE, the Indoor Guide
The second team to submit from TAMU included students Jesse Rosart-Brodnitz, Shanley Mullen, and Jacob Ladigo. The trio created VALE, an autonomous guide robot designed for use within large office buildings or retirement homes. They were advised by Dr. Garth V. Crosby and Dr. Xingyong Song, who are both Associate Professors in the Multidisciplinary Engineering Technology Department at TAMU.
The main purpose of VALE is to help the disabled and elderly who might have cognitive issues that limit them from being able to freely navigate large buildings. With the SICK LiDAR, VALE initially travels within an area on its wheels, and generates a list of points to create a 2D map of the area. From this, room coordinates can be extracted from the blueprint, and labeled appropriately by building managers.
Once this simple set-up process is complete, VALE can be used as a guide by anyone who may need it. Users must simply indicate a location on VALE’s touch screen, and VALE will lead them to it. While driving to the location, VALE utilizes the LiDAR sensor for localization and obstacle avoidance.

“Basically, the LiDAR sensor acts as VALE’s eyes,” Rosart-Brodnitz explained. “If something came within a pre-defined distance of the robot, it would trigger a warning in the system and VALE would avoid it.”
The robot will also check in with users regularly and make sure they are still following. Designed to be easily seen by anyone, VALE was built with bright and contrasting colors.
One problem that the team experienced was linked to the core processor. “While the one core processor is great for smaller robotics projects, we found that the SICK LiDAR took too many high-resolution data points for the system to handle,” Rosart-Brodnitz said. “We weren’t able to run everything at once. So we decided to scale back the resolution and let the points overlay to build a full map.”
Instead of taking 270 points in any given location, the team was able to build detailed maps with about 15. This alleviated a lot of processing and power issues.
Like many other teams during this year's TiM$10K Challenge, COVID-19 was the biggest problem the team faced. The team was originally going to have VALE explore a campus building and see how it reacted out on the field, but they were unable to.
“We wanted to be able to demonstrate that VALE could function across campus, but campus had already closed by the time we were ready,” Mullen said. “We could only demonstrate it in our small student apartments, which didn’t allow us to show the full functionality of it.”
Team Three: C.R.A.W.L., the Road Maintenance Solution
The final TAMU team to enter the TiM$10K Challenge included students Harvey E. Stewart III, Michael Ramirez, Brandon Hagen, and Santiago Garza. These four students created C.R.A.W.L., a device that can aid local and state entities to analyze current road conditions and allow them to prioritize repairs. The team was advised by Dr. Garth V. Crosby, Associate Professor in the Multidisciplinary Engineering Technology Department at TAMU.
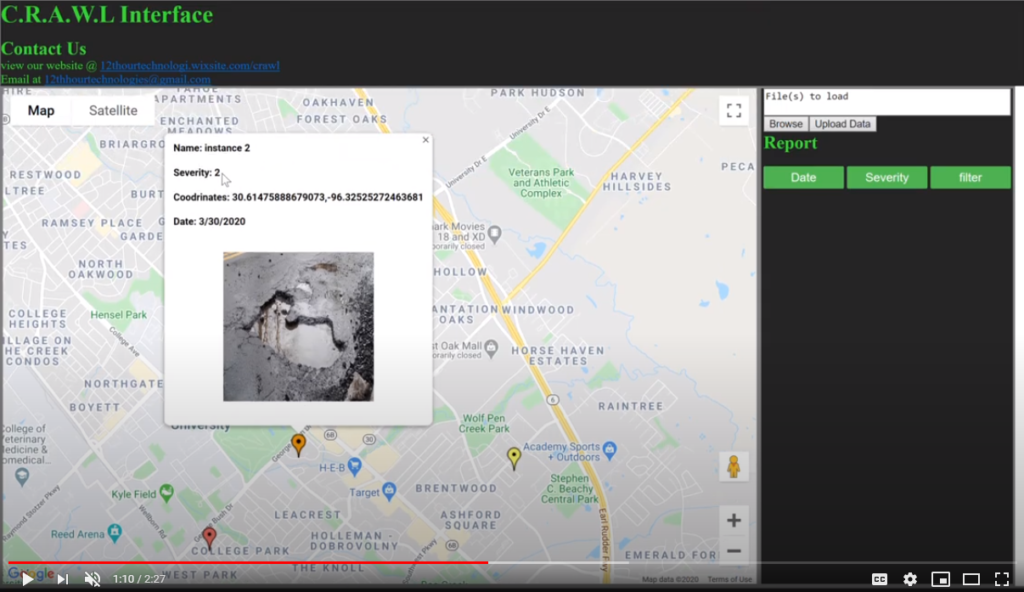
C.R.A.W.L. simplifies road maintenance by using the TiM LiDAR to detect cracks and potholes along roads to map all the hazards. A color coordinated depth chart is generated to allow for easy assessment of the required repair, which an algorithm uses to designate areas with a greater need for repair. For example, the algorithm will determine the severity of damage (i.e., width or depth of a pothole) and score the damage in three tiers, Tier 3 being the most severe. A camera then takes a photo of the damaged area once it has been scanned by the LiDAR. This integrated system allows for a faster method of evaluating road conditions and estimating the cost of repairs.
The team dealt with their fair share of problems as they developed C.R.A.W.L. One such problem came with the LiDAR, as their code was capable of scanning at a high frequency, but the refresh rate tended to stay at 15Hz.
“When we thought we were getting data at a higher frequency, we would pull it as fast as our processor was able to,” Stewart explained. “The data just wasn’t updating that fast. What ended up happening was that we got a lot of duplicate data.”
This meant that they had to slow down their scans. However, they found that they were able to see potholes by only scanning part of them. If they scanned at a faster rate and weren’t able to collect all the data on a pothole, the were still able to collect enough data to identify the severity of the pothole and amount of data they missed would be virtually insignificant.
The team also did some road testing to see how water on the road might affect the scans. The result: no false positives off the scans. “Simply put, a pothole full of water didn’t confuse the LiDAR into thinking it wasn’t damaged road,” Stewart said.
Toward the end of this project, the COVID-19 pandemic hit and that caused some minor setbacks on the team's timeline.
“It threw off our timeline since we were no longer around to meet, but we kept in constant contact through Zoom meetings, Google Drive, and GroupMe,” Ramirez said. “Time management is definitely important for these projects, because you never know what roadblock might come up.”
![]() Register for the 2020-2021 TiM$10K Challenge
Register for the 2020-2021 TiM$10K Challenge
SICK is now accepting entries for the TiM$10K Challenge for the 2020-2021 school year! Student teams can register online by September 14, 2020. Student teams are encouraged to use their creativity and technical knowledge to incorporate the SICK LiDAR for any industry in any application. Advisors/professors are allowed to guide the student teams as required.
This contest was supported by PMMI Foundation’s U Skills Fund. PMMI Foundation works to grow awareness of careers in packaging and processing, providing assistance to schools and programs that develop students to excel in the industry.


