


3D localization with the Belt Pick SensorApp and the programmable TriSpectorP1000 for pick-and-place tasks
The ability to ensure hygienic primary packaging of sensitive open food is incredibly important within the food industry. This is why SICK is working with the Swiss robot manufacturer, Stäubli, to make this process possible within a robot cell. The TriSpectorP1000 3D vision sensor from SICK and the four-axis FAST picker TP80 HE from Stäubli solve picking processes while the conveyor belt is in motion. 3D parts localization is implemented by the Belt Pick SensorApp and SICK AppSpace. In case studies, different food products were successfully sorted in packaging trays.
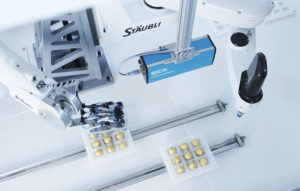
Both the food and pharmaceutical industries have extensive requirements when it comes to sorting and orientating small objects in a hygienic packaging process. In partnership with Stäubli, a pilot project was developed to sort shrimp using the FAST picker TP80 HE while the conveyor belt is in motion. With the programmable 3D visioion sensor, the TriSpectorP1000, SICK is opening up a diverse range of applications. From salad to cookies to sausages, the TriSpectorP1000 is capable of handling a whole host of different tasks and accurately sorting a variety of different products. The 3D technology is particularly ideal for objects of irregular size and variable height, as well as for double-layer detection. With an encoder, the sensor is capable of detecting each individual object both accurately and reliably.
 Once the position of an item has been recorded on a three-dimensional basis, the exact coordinates are passed on to the FAST picker TP80 HE. Its vacuum gripper then removes the shrimp from the belt one by one and places them in the trays according to a specified packing pattern. The four-axis robot arm can typically handle over 200 picks per minute. This particular application does not require maximum speed, yet the robot is still capable of sorting over 60 shrimp a minute. Making a 3D vision sensor a fast, smart, and great option for picking food off of lines.
Once the position of an item has been recorded on a three-dimensional basis, the exact coordinates are passed on to the FAST picker TP80 HE. Its vacuum gripper then removes the shrimp from the belt one by one and places them in the trays according to a specified packing pattern. The four-axis robot arm can typically handle over 200 picks per minute. This particular application does not require maximum speed, yet the robot is still capable of sorting over 60 shrimp a minute. Making a 3D vision sensor a fast, smart, and great option for picking food off of lines.
The TriSpectorP1000 records the position of the products by means of a laser triangulation process, which also calculates their height and volume. This is particularly significant when packaging organic products, as their sizes tend to vary. Furthermore, the ability to calculate volume makes it possible to reject shrimp that are too small in this particular application. The FAST picker TP80 HE also uses this measurement data to achieve a visually appealing presentation within the tray and ensure a standardized packaging weight.
Tailor-made 3D vision solutions with SICK AppSpace
The 3D localization capability allows the robot to detect the spatial position of an object as part of a sorting task, regardless of the contrast situation. It can even prevent collisions with the object thereby avoiding any resulting damage. SICK offers tailor-made 3D vision solutions for flexible automation powered by SICK AppSpace. It is an eco-system of software tools and an expanding number of programmable devices based on technologies such as 2D and 3D vision, RFID, and LiDAR. By using the application programming interface (API) functions, so-called SensorApps are developed.
The SICK Belt Pick Toolkit is a SensorApp specialized for locating products on a conveyor belt which is also in use here in cooperation with Stäubli. With this piece of software installed, the camera turns into a 3D belt-picking sensor. This also offers excellent prospects for the future.
Regardless if the task involves sausages or medication, product changeovers require virtually no adjustments – if any at all – as long as the mechanical dimensions are similar. Conversions such as these couldn’t be easier with the TriSpectorP1000, as they are all handled automatically and digitally using SICK AppSpace to make the entire process of handling packaging lines more efficient all round.
![]() Want to learn more about the TriSpectorP1000 and the 3D Belt Pick SensorApp? Contact a SICK Representative at info@sick.com!
Want to learn more about the TriSpectorP1000 and the 3D Belt Pick SensorApp? Contact a SICK Representative at info@sick.com!


