

A Video Series Featuring Nick Longworth, Senior Robotics Engineer with SICK
Looking for a solution that can make your bin picking tasks move faster and more efficiently? Automated bin picking is often a better alternative to doing these tasks manually. Vision-guided robots enable you to perform bin picking tasks faster and more accurately. Check out how these systems play a role in the robot revolution.
When using a vision-guided robot like SICK’s PLB, there are still some challenges. In our video series, we discuss how SICK is contributing to the industrial robot revolution happening currently throughout the manufacturing industry. It addresses key challenges associated with automated bin picking and how you can more easily implement automated processes.
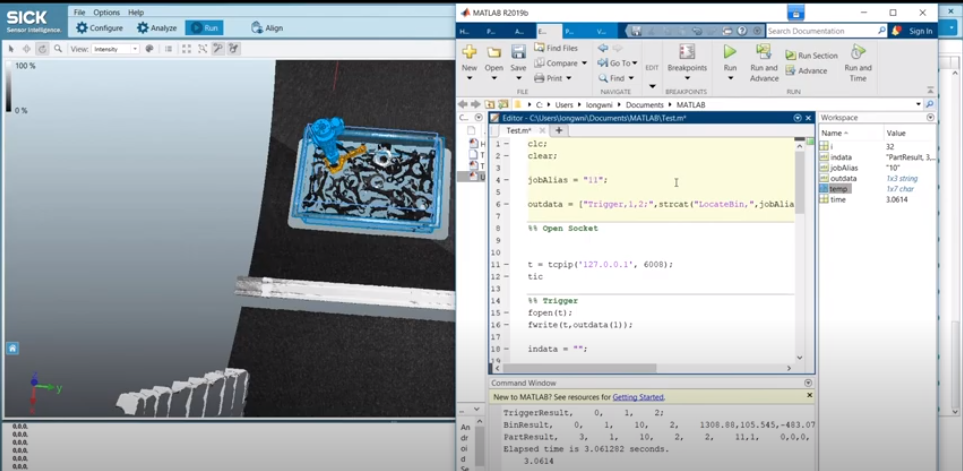
In this latest video, SICK’s robotics expert, Nick Longworth, addresses the robot communication system used with the PLB. The PLB system communicates over a TCP/IP socket communication system and it helps to govern all data that comes across the socket. You can setup a number of commands and variables depending on your application. In this demo, Nick will walk you through how to setup different communication variables.
 Enter the PLB Challenge
Enter the PLB Challenge
Interested in learning more about the PLB (or the robot revolution)? Wondering if it will work for your specific application? Send us a message to have your parts featured in one of our videos!


