

The following instructions illustrate how to use the multiplexing and synchronization modes for the UM18 Pro and UM30 Ultrasonic Sensors from SICK to broaden the sensing range or eliminate unwanted crosstalk.
These instructions are not meant to replace the Operating Instructions for these products.
 Crosstalk with Connected Ultrasonic Sensors
Crosstalk with Connected Ultrasonic Sensors

When connecting multiple ultrasonic sensors together, the issue of crosstalk is an important consideration. Crosstalk occurs when multiple sensors emit sound, and the returning sound pulses are received at different times by a sensor that was not the sender.
In applications where you need multiple ultrasonic sensors to operate together, crosstalk can be an issue. However, there are situations where you need all sensors to act like one big sensor and detect a broader range than would be possible with a single sensor. For example, when using ultrasonic sensors for collision avoidance (non-safety rated), you might want all sensors to be able to “hear” each other’s sound pulses in order to avoid possible collision as quickly as possible.
However, in other cases, you want the sensors to behave individually and give unique outputs. Crosstalk causes problems in these applications. For example, when detecting the presence of an item on a conveyor or packaging line, crosstalk between sensors can lead to faulty data when one sensor picks up another sensor’s pulses. This could result in detection of an object that is not there.
In order to properly connect your ultrasonic sensors—whether you want the sensors to fire simultaneously or need to eliminate unwanted crosstalk—you will need to use either Synchronization or Multiplexing modes, available for SICK UM18 Pro and UM30 sensors through the Connect+ software.
 How To Use Synchronize and Multiplex Modes in Connect+
How To Use Synchronize and Multiplex Modes in Connect+
With Connect+ software, all UM18 Pro and UM30 ultrasonic sensors from SICK can be configured in either Multiplexing or Synchronization modes for up to 10 connected sensors.
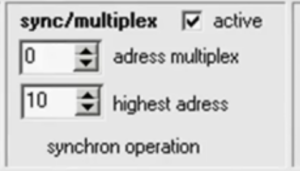 Synchronization simply tells all sensors to fire simultaneously, so that the time it takes to receive a pulse is the same for all the sensors so the distance calculated is accurate. In order to synchronize the UM18 Pro or UM30 sensors, go to the sync/multiplex option box in Connect+ and set the address for each sensor to 0.
Synchronization simply tells all sensors to fire simultaneously, so that the time it takes to receive a pulse is the same for all the sensors so the distance calculated is accurate. In order to synchronize the UM18 Pro or UM30 sensors, go to the sync/multiplex option box in Connect+ and set the address for each sensor to 0.
Multiplexing tells the sensors the order in which they should emit a pulse and listen for a return. In order to set the sensors to multiplexing mode, you must give each sensor an individual address on a scale of 1 to 10—with 1 being the first sensor to fire, 2 being the second, and so on.
You must also set the highest address to match the total number of sensors being connected. For example, if you are connecting 8 sensors, the first sensor will have an address of 1, and the highest address will be listed as 8.
Important: Do not start at 0 when multiplexing sensors in Connect+. Starting at 0 is meant only for synchronization.
Note on Hardware: Pin 5 (which is typically the grey wire) of each sensor should be tied together electrically. This pin 5 is the communication connection between sensors allowing them to fire synchronously in Synchronization Mode or separately in Multiplex Mode.
[custom_author=Dan Bruski]
[custom_author=Meghan Bommareddy]


